Eric Smith, Engineering Manager – Precision Agriculture, JCA Technologies
At JCA Technologies, we regularly work with OEMs automating common tasks on mobile agricultural equipment and adding software controls to systems. The most applicable tasks for automation are anything that is repetitive, and timely, where accuracy and consistency is important. Automation frees the operator from repetitive mundane work allowing them to focus on more complex tasks. In many cases this also increases efficiency, enabling operators to complete tasks quicker and more accurately, sometimes reducing the number of operators required, and in general reducing labor costs.
Automating tasks quite often involves applying force to mechanical loads and adjusting the force based on feedback from the sensor(s). There are several ways of accomplishing this, and the most appropriate for the task depends on several factors such as the forces involved, mechanics of the system, reliability, accuracy, and cost.
Applying Forces
JCA has a lot of experience using hydraulics, pneumatics, and electric actuators and motors to apply force and control mechanical motion on mobile machines. Some applications require specific positions to be held for steering, downforce, or achieving an outcome such as an application rate. Other applications require motion at a specific rate. All of this is possible by selecting the right technology and software control algorithms.
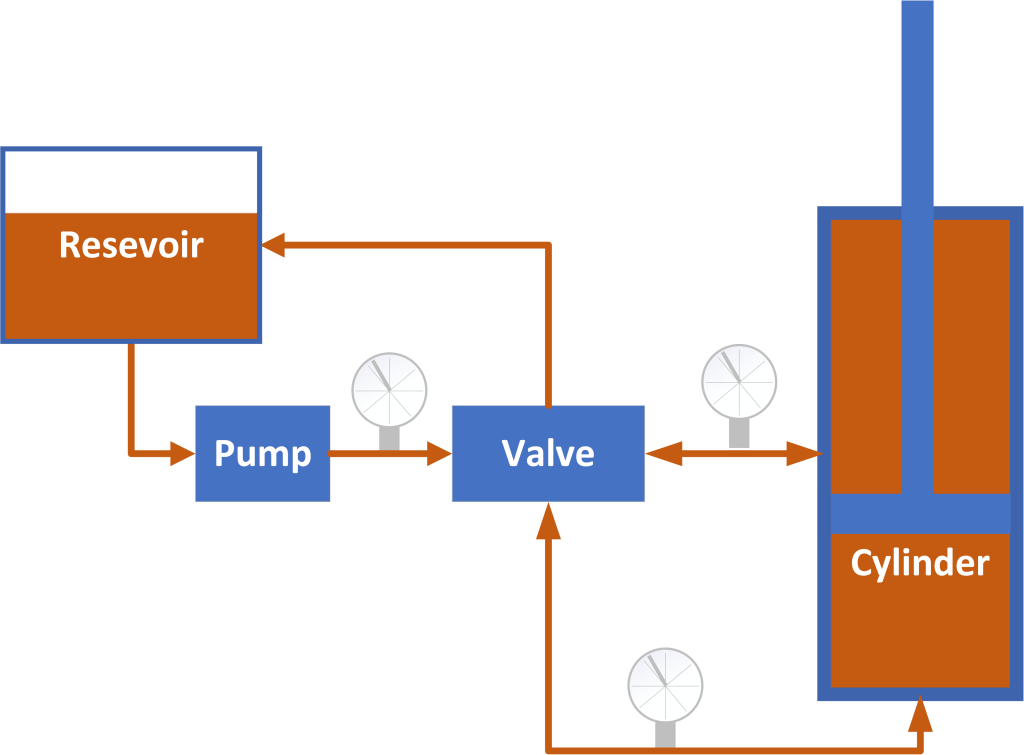
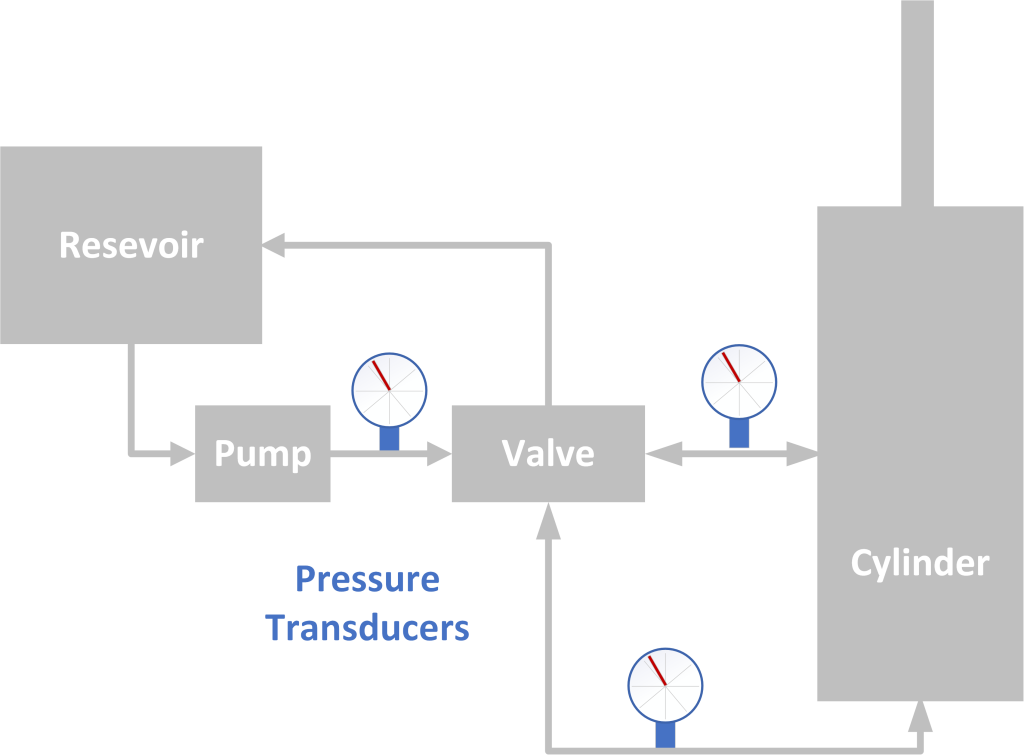
Hydraulics and pneumatics are quite similar when compared at a high level. Pressures are adjusted using on-off or variable rate valves which have electric interfaces so that they can be controlled by software running on an ECU. They are best suited for different applications. Pneumatics are simpler, lower cost, involve less maintenance, react quickly, and are best for shock absorption-related applications because air (typically used) is easily compressed, but only small pressures and therefore small forces can be generated. Hydraulics are more expensive and complex, require more maintenance, and react slowly, but can be used to apply large forces required to position and move heavy loads.
Electric actuators and motors can also be used to control position, movement, and application rates. Electric controls eliminate pumps, valves, and plumbing and replace them with heftier wiring and circuits driving the actuators and motors. The wiring and circuits are more reliable and efficient, which reduces maintenance costs and effort. Supplying power for electric controls can add complexity because high electric power sources are not normally available on current mobile machines, whereas hydraulics can often be supplied from the tractor. Like pneumatics, electric components are best suited where forces are relatively small because their power requirements grow quickly and add complexity. Electric actuators have a high initial cost and low operating cost relative to pneumatics.
Sensors
JCA regularly designs systems that integrate various types of sensors to achieve customer goals. Several factors are considered when selecting the best sensor for the application, and sometimes the selection process includes field testing multiple options.
The sensors are required to provide feedback to the software control algorithms to control the forces and movements sourced by hydraulics, pneumatics or an electric actuator or motor. The best suited sensor depends on the application and what is trying to be achieved.
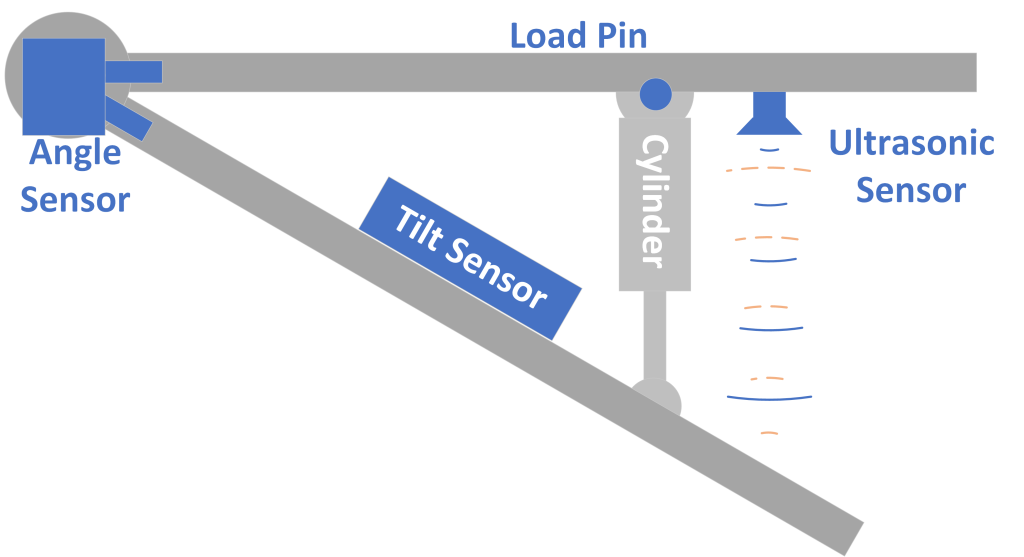
Pressure transducers, load cells, and load pins are used to measure force. They can be directly used along with a valve and cylinder or actuator to apply downforce during tilling and planting, monitor drag, and redistribute weight.
There are several different sensor options that are used to monitor position and movement including linear encoders, rotary encoders, angle sensors, tilt sensors, and position sensors such as ultrasonic and radar. Again, each have their advantages which make them best suited for specific applications. The sensitivity and accuracy vary depending on the technology, some are more rugged than others, and less affected by environmental factors such as dust, dirt, and moisture.
Positioning based on GPS (GNSS) technology is also commonly used in precision agricultural applications. Precision agriculture technologies target increased accuracy of application of agricultural inputs (seed, fertilizer) to optimize yields, and accurate positioning has been a significant enabler of these function. Some common precision agriculture functions include variable rate application, auto-steer capabilities, and prescription-based application. Position accuracy depends on the technology and location and can range from several meters down to 1 cm (sub-inch). Logging actual tasks and application rates based on location is also very valuable, allowing owners to verify tasks are complete, review their effects, and improve their operations and yield.
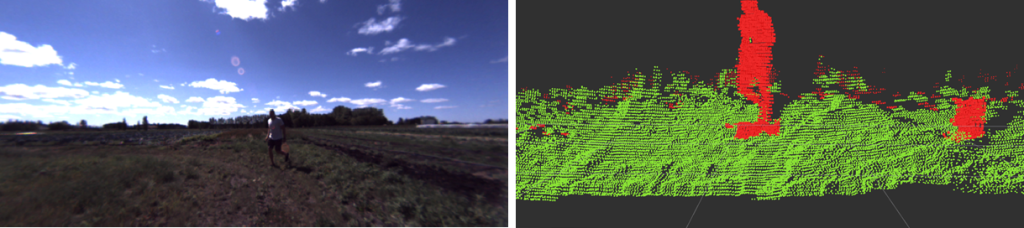
In recent years there has been a rapid increase in capability and availability of rugged advanced vision-based sensors that can bring new capabilities to off-highway mobile machines. These sensors include technologies such as Lidar, 2D and 3D cameras. These advanced sensors are more expensive and typically require more complex interfaces and ECUs with high processing capabilities because they can provide a lot of information, but they also open new opportunities for value in machine applications. They are generally used for machine perception, where a system detects and interacts with its surroundings based on higher level decisions. These sensors can be used for navigation, adding the ability to detect and avoid obstacles, and for highly specialized tasks such as detecting plants or parts of plants. For example, the location of weeds can be detected and eliminated using mechanical tools or spot application of herbicide. Another example is harvesting specialty crops such as fruits and vegetables.
Interfacing with an ECU(s)
JCA has a family of controllers with varying capabilities, all designed to interface with valves, actuators and motors used to control movement, as well as sensors. The controllers have a varying number of inputs and outputs that can be configured to control valves and monitor various sensors, which typically have analog voltage, current, PWM or CAN interfaces.
Each system we develop for our customers contains custom software that configures the inputs and outputs for the system’s valves, actuators, motors, and sensors. Control algorithms are then developed to provide a user interface for the operator (more on this in next month’s post), and perform desired tasks based on operator actions and sensor feedback.
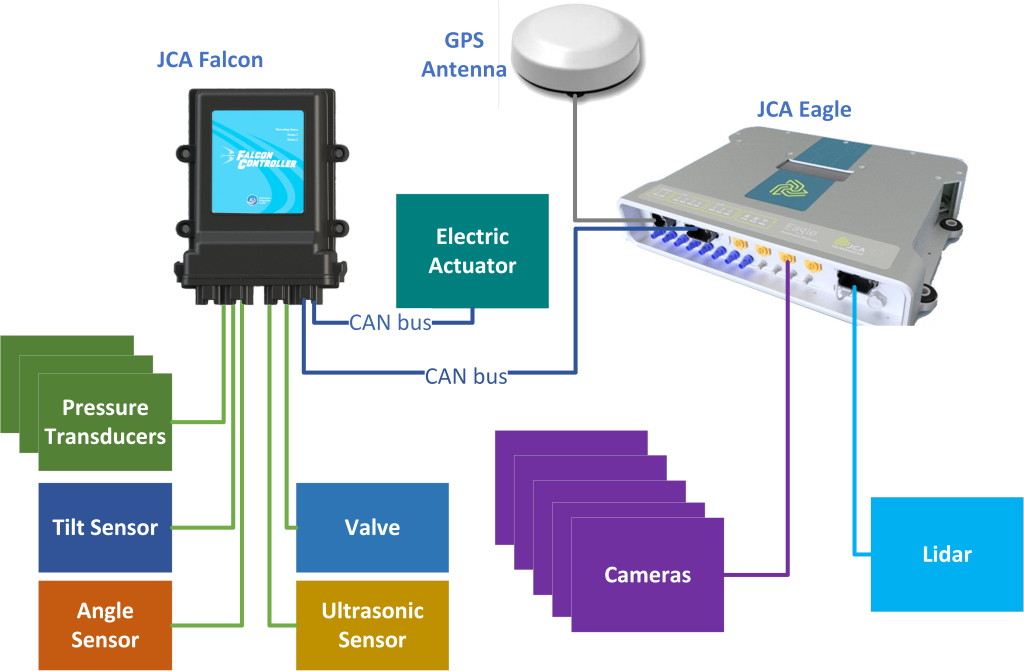
The controller, or controllers, designed into a system depend on what and how much needs to be controlled. Our controllers are designed so that in they can easily communicate with each other, enabling them to be used in large and more complex systems.
Summary
Most systems can benefit from additional automation to bring value to the end user through improved accuracy, increased efficiencies, and reduction of repetitive tasks. Determining what is appropriate for each system can be a complex undertaking and listening to operators provides a lot of insight. We often work with machine manufacturers to help refine early and rough concepts into solutions that can be implemented to provide real value in the application. Once an initial system comes together and demonstrates value, typically additional automation opportunities arise and then it is just a matter of selecting the ones that provide best value to the end user.