This article was Part 3 in a four-part series on multi-machine agricultural systems, which addressed a specific challenge – how can connected machines be supported in limited connectivity areas?
- Part 1 set the current landscape for multi-machine systems
- Part 2 discussed impact of proper architecture and design
- Part 4 addressed integration of fleet, task, and mission management
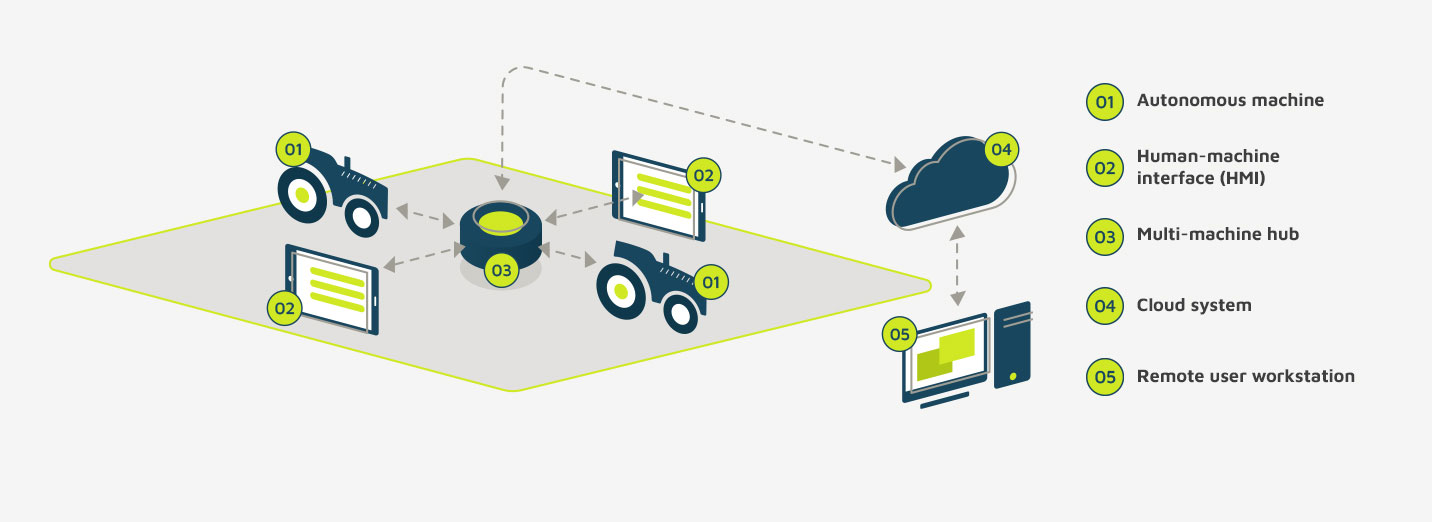
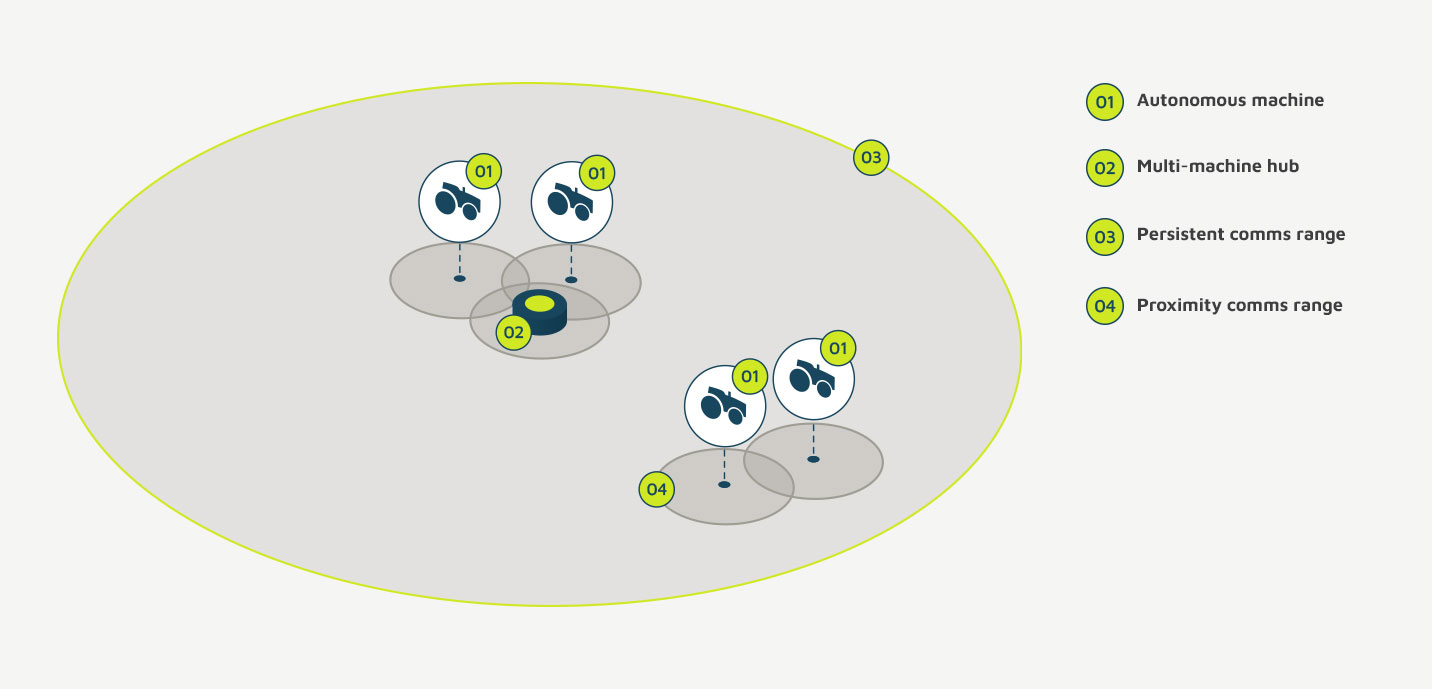
A significant challenge for multi-machine agricultural systems is that often they need to operate in remote areas that do not have reliable Internet access. For many applications, being dependent on a reliable Internet connection to operate is not an option. The last thing that farmers want to deal with is being shut down at critical times in the agricultural season because of connectivity issues. This means that scalable agricultural mobile machine systems must be designed to work in areas with no cell access or reliable Internet. This article describes the impact of this limited connectivity, and some of the strategies that JCA has used to address these challenges.